TEKNOFEST 2019 için hazırladığımız ve finale kalan “Harita Çıkarıcı Otonom Robot” isimli projemizin proje detay raporunu sizlerle paylaşıyoruz. Örnek Teknofest projemiz ile geçtiğimiz sene İstanbul Atatürk hava alanında İnsanlık yararına Teknolojiler Yarışması Afet Yönetimi alanında yarışmıştık.
Projemizi Unity ve Arduino ile geliştirdik. Arduino ile mesafe ölçen ve engelden kaçan bir araç geliştirdik. Bu araçtan elde ettiğimiz bilgilerle de Unity üzerinden 3 boyutlu çevre haritası oluşmasını sağladık.
Teknofest 2019 da yarıştığımız “Artırılmış Gerçeklik İle Canlı Dünya” projemizin proje detay raporuna, ön değerlendirme raporuna da sitemizde paylaştık.
TEKNOFEST 2020 Proje Detay raporu nasıl hazırlanır konulu yazımız ile geniş bir rehber hazırladık.
“Harita Çıkarıcı Otonom Robot projemizin proje Detay Raporunu buradan indirebilirsiniz. –>Otonom araba Proje Detay Formu
İçerik Tablosu
TEKNOFEST İSTANBUL HAVACILIK, UZAY VE TEKNOLOJİ FESTİVALİ
İNSANLIK YARARINA TEKNOLOJİLER YARIŞMASI PROJE DETAY RAPORU
PROJE KATEGORİSİ: Afet Yönetimi
PROJE ADI: Harita Çıkarıcı Otonom Robot
TAKIM SEVİYESİ: Lise
PROJE EKİBİ:
DANIŞMAN ADI:
Proje Özeti
Harita Çıkarıcı Otonom Robot konulu bu projemiz ile mikrodenetleyici ve çevresel birimlerin kontrolünde engellere çarpmadan ilerleyen, engel ve yön bilgilerini ve üzerinde yer alan kamera modülü ile ortam görüntülerini, bilgisayara ileten bir robot ile bu bilgileri alıp ortamın 3 boyutlu haritasını çıkartan bir yazılım tasarlanması amaçlanmaktadır.
Robotumuz afet vb durumlarda insanların erişemeyeceği ortamlarda çalışabilecek ve bu ortamların 3 boyutlu haritasını çıkarabilecek aynı zamanda bu ortamlarda otonom hareket edecek şekildedir. Robotumuz Eş Zamanlı Konum Belirleme ve Haritalama olarak bilinen tekniği kullanarak, kendi konumunu öğrenmesi ve gerçek konum bilgilerine maksimum yaklaşması, bu işlemi yapması için ortamın haritasını çıkarabilmektedir. Robotumuz hareket kabiliyeti açısından farklı ortam koşullarında hareket edebilecektir. Geliştirdiğimiz algoritma yardımı ile çevrenin ön topolojik bilgilerine ya da birtakım referans nesnelerinin yer bilgisine sahip olmadan ve ihtiyaç duymadan Eş Zamanlı Konum Belirleme ve Haritalama (EZKH) yapmaktadır. Dolayısıyla robot bilinmeyen bir ortamda bilinmeyen bir noktadan harekete başlayarak bir taraftan bu ortamın 3 boyutlu haritasını çıkarırken, bir taraftan da kendi yerini tahmin etmekte ve başlangıç noktasına döndüğünü de algılamaktadır. Robotumuz gezinme esnasında etrafındaki olayları algılayıp, nereye gideceğine yine kendi başına karar verecektir. Robotumuz algılayıcı sensörler kullanarak etrafındaki cisimlere olan uzaklığını ölçmektedir. Bu ölçümlerden yola çıkarak yoluna nasıl devam edeceğine karar vermekte ve konumunu bildirmektedir. Robotumuzun çıkarttığı harita yalnız 2 eksen değil yükseklik bilgisini de içerecek şekilde 3 boyutlu olmaktadır.
Problem/Sorun:
Afet ve benzeri durumlarda insanlar tarafından ulaşılamayan bölgelerde can ve mal kaybı yaşanması ve insanların ulaşamayacağı, karanlık ortamların keşfedilmesinin zor olması.
Çözüm
Projemiz ile karanlık ortamlarda dahi ortamın haritasını çıkartabilecek ve ortamda kendi yönünü bulabilecek bir otonom araç geliştirilecektir. Üzerinde ki mesafe sensörlerinden gelen verileri, kablosuz bağlantı ile gönderilerek haritanın oluşması sağlanacaktır.
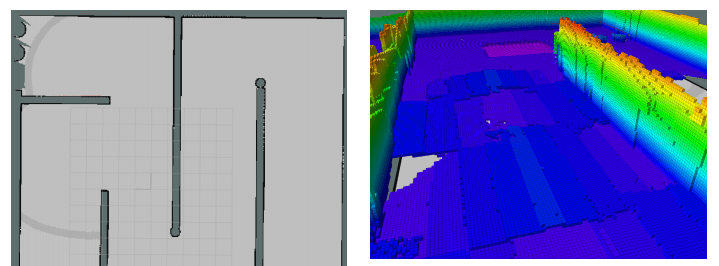
Octomap ile haritalanacak alan ve çıkartılan 3 boyutlu haritanın gösterimi.
Yöntem
Projemizde bir 2WD arduino araç kiti kullanılmaktadır. Üzerinde 3 tane HCRS04 ultrasonik mesafe sensörü bulanmaktadır. Bu mesafe sensörlerinden gelen veriyi işleyerek harita haline getirilmesi sağlanmaktadır. Robot bu sensörlerden gelen verileri bilgisayar iletmekte ve bilgisayarda oluşturulan algoritma ile bu veriler OctoMap programı yardımıyla 3 boyutlu haritaya dönüştürülmektedir.
Robotun konumunu belirlemesi ve geri dönmesini sağlamak için GPRS modülü kulanılacaktır. Robotun nerde olduğunu görmek ve hareketlerini takip etmek içinde ESP32 CAM modülü robota dahil edilecektir. Bu sayede eş zamanlı olarak robotun hareketleri modülün sağladığı IP adresi bilgisiyle takip edilebilecektir.
Yenilikçi(İnovatif) Yönü
Projemiz ile hem harita çıkarabilen hem de kendi kendine yön ve konum belirleyebilen bir sistem geliştirildi. Karanlık ortamlarda yönünü belirleyebilmesi için ultrasonik mesafe sensörleri kullanıldı.
Uygulanabilirlik
Projemiz uygulanabilirdir. Kullandığımız sensör vb. heryerde bulanabilir sistemlerdir. Afet gibi durumlarda ve farklı ortamların haritalandırılmasında kullanılabilir.
Tahmini Maliyeti
Kullanılan malzemeler:
- Arduino UNO
- ESP32 Cam Modülü
- HCRS04 x 3
- 2WD veya 4WD araç kiti
- Motor Sürücü kartı
- Kablolar ve piller
Yukarıda çıkartılan malzeme listesine göre üretilecek robotumuzun maliyeti yaklaşık 1500TL dir.
Proje Fikrinin Hedef Kitlesi (Kullanıcılar):
Projemiz afet kurtarma ekiplerine yardımcı olacak bir projedir.
Aynı zamanda haritalandırma özelliği sayesinde coğrafya üzerine çalışanlar ve haritalandırma işini yapanlara yöneliktir.
Kullandığımız haritalandırma altyapısı farklı robotlarda da kullanılabilir.
Riskler
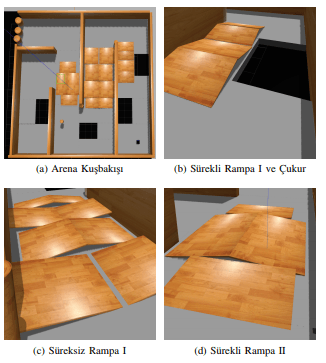
Robotun hareket edeceği zeminin çok bozuk olması robotun hareketlerini kısıtlayacaktır. Robotun bütünlüğünü bozacak dış etkenler.
Proje Ekibi:
| Adı Soyadı | Görevi | Okul | Sınıf |
Kaynaklar
- https://www.instructables.com/id/ROOM-MAPPING-Arduino-Robot-With-Unity-3D/. (2019, 05 09). 05 09, 2019 tarihinde https://www.instructables.com: https://www.instructables.com/id/ROOM-MAPPING-Arduino-Robot-With-Unity-3D/ adresinden alındı
- Azad Yasar, E. U. (2018). Tasarlanmış Engebeli Ortamda Otonom Mobil Robot Gezinimi. Akıllı Sistemler ve Uygulamaları Dergisi, 67-74.
- HABİBOV, B. M. (2011). GEZGİN ROBOTLARLA EŞ ZAMANLI KONUM BELİRLEME VE HARİTALAMA. İSTANBUL.
- https://www.instructables.com. (tarih yok). 05 09, 2019 tarihinde https://www.instructables.com: https://www.instructables.com/id/Ultrasonic-3D-Maps-With-Python-and-Arduino/ adresinden alındı
- ÖZYILMAZ, Y. D. (2009). Harita Bilgisi Toplayan Gezgin Robot Uygulaması. İstanbul.
Projemiz hakkındaki yorumlarını bekliyoruz.
Hocam Lise seviyesi çevre ve enerji teknolojileri yarışmasına finale kaç kişi secilecek? Bilginiz var mı? Bir de proje detay raporu gönderirken öğrenci ve öğretmen için herhangi bir belge lazım mı? Lazımsa nasıl gonderecegiz?
Selim ne yazık ki kaç proje çağrılacağı konusunda herhangi bir bilgi verilmiyor. Danışmanlık Belgesi, Görevlendirme Belgesi ve Öğrenci belgelerini bu aşamada göndermenizi sizlerden beklenmektedir.
Öğrenci belgelerini e-devlet üzerinden alabilirsiniz.
Merhabalar kodlarını inceleme imkanımız varmı yada bulabilceğimiz bi yer